As part of ME 112: Mechanics of Materials, I worked with Mykel Braswell, Raven Jackson-Stone, and Michelle Teo to design and build Rabbit. Using four-bar linkage design, mechanical gearing, and cam shafts, we developed Rabbit to meet the objective of climbing an inclined ramp within 30 seconds.
We developed Rabbit using two approaches: simulation and physical prototyping. Simulation analytics included torque analysis, Matlab modeling of the mechanism’s gait, and Solidworks modeling. Physical prototyping included Lego testing of linkages, cardboard mock-ups of bodies, and laser cut assemblies. The two approaches would not work without the other - simulations did not account for real world factors, creating unpredictable physical results; physical prototypes did not lend themselves to quick calculations or leaping iterations.
We developed Rabbit using two approaches: simulation and physical prototyping. Simulation analytics included torque analysis, Matlab modeling of the mechanism’s gait, and Solidworks modeling. Physical prototyping included Lego testing of linkages, cardboard mock-ups of bodies, and laser cut assemblies. The two approaches would not work without the other - simulations did not account for real world factors, creating unpredictable physical results; physical prototypes did not lend themselves to quick calculations or leaping iterations.
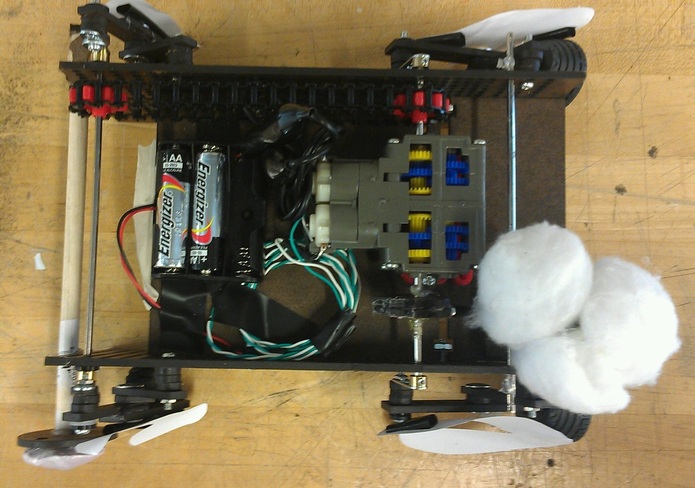
An aerial view of Rabbit
